 预约试驾
预约试驾


小鹏G3 用户手册
自适应巡航系统(ACC)
自适应巡航(ACC)是一项舒适性的辅助驾驶功能。如果车辆前方畅通,自适应巡航(ACC)将保持设定的最大巡航速度向前行驶。如果检测到前方有车辆,自适应巡航(ACC) 将根据需要降低车速,与前车保持基于选定时间的距离,直到达到合适的巡航速度。
自适应巡航(ACC)启用时,驾驶员仍需观察前方路况并在必要时施加制动。
自适应巡航(ACC)主要用于高速公路等干燥的直路上行驶,在城市街道上不应使用自适应巡航(ACC)。
操作自适应巡航(ACC):
车辆 Ready 后,首次无法通过上下拨杆进入ACC。
除非探测到前方有车辆,否则必须在本车速度高于 15km/h 才能使用自适应巡航(ACC)。
如果探测到前方有车辆,则可在任何车速下启动自适应巡航(ACC),即使静止状态也可以,但与前车的距离会至少为 2 米。
最低设定速度为 30 km/h,最高设定速度为120 km/h。驾驶员有责任根据道路状况和车速限制设定安全的车速巡航。

仪表板在行驶速度左侧显示灰色的车速表图标 ,表示可以使用自适应巡航(ACC),但尚未激活。
,表示可以使用自适应巡航(ACC),但尚未激活。

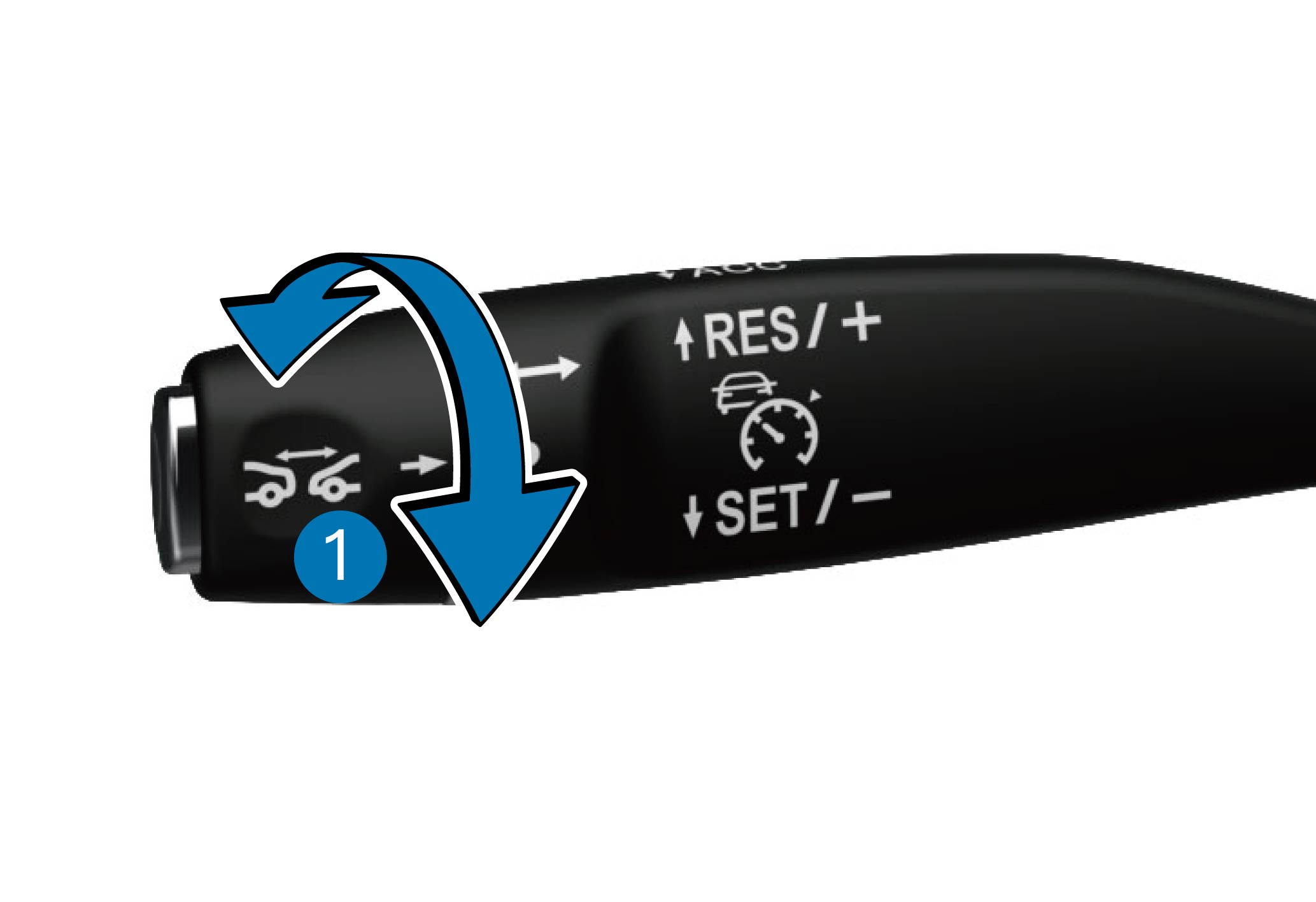
─在这种状态下,沿②方向拨动一次巡航控制手柄,即可启用自适应巡航(ACC)功能。
─成功激活 ACC 功能后,仪表板的指示灯将变成蓝色。
启用 ACC 功能后,系统会辅助驾驶员控制车辆速度,由 ACC 保持设定的速度,未检测到前方有车辆时,ACC 会保持在设定的速度行驶。如果检测到前方有车辆, ACC 会根据需要提高或降低车辆的速度,在设定速度之下保持您选择的跟车距离。
ACC 还会在驶入和驶出弯道时适当调节车速。
在 ACC 状态下以设定的速度行驶时,您可以随时进行加速。当您松开加速踏板时,车辆将返回到设定的速度。
跟车时,ACC 在低速行驶时仍保持可用,前方车辆停止后, ACC 会控制本车跟随停止。当车辆再次行驶后,ACC 会以当前设定的车速恢复工作。
在以下情况下,ACC 将进入保持状态而不会恢复,仪表板会显示提示信息,提示您需要恢复巡航控制:
─ 停驶时间达到 90 秒。
─ 超声波传感器探测到车辆前方有较近的障碍物或行人。
─ 车辆突然检测不到被跟随前车。
要恢复 ACC,请踩下加速踏板或朝自己方向拨动巡航控制手柄。

─ 以设定的车速行驶时,沿或方向拨动巡航控制手柄后松开,即可调整已设定的巡航速度。
ACC 主动降低车速以便与前车保持选定距离时,刹车灯亮起,提醒其他道路使用者您正在减速。但是,当 ACC 在控制车辆加速时,加速踏板不会移动。
驾驶员需要及时响应接管车辆的请求
当自适应巡航(ACC)需要驾驶员接管车辆时,会通过仪表液晶显示屏向驾驶员发出接管请求提示,同时发出接管提示警告音。
当仪表液晶显示屏显示 “立即接管”等请求字样时,驾驶员应立即接管车辆,控制车辆速度,避免危险的发生。
 注意:
注意:
- ●如果驾驶员已经发现了危险,切勿等待接管请求发出后再接管车辆,请立即接管车辆。
调节跟车距离
如需调整您希望与前方车辆保持的距离,可转动巡航控制手柄,从设置中选择一项设置。每种设置对应一个基于时间的距离,其中基于时间的距离表示车辆从当前位置到达前车尾部所需的时间。
系统将对驾驶员的跟车距离设置进行记忆,每次车辆重新 Ready 后,默认为上一次设置的跟车距离。

转动巡航控制手柄时,仪表板显示当前设置。
调节最大巡航速度

要在使用 ACC 时更改设定车速,沿4(向上加速) 或5(向下减速)方向拨动巡航控制手柄,直至显 示所需的设定速度后松开。
将手柄沿 4 / 5 方向短促拨动一次后松开,可以单次加速 / 减速。
将手柄持续保持在完全向上 / 向下位置来执行持续加速 / 减速。
踩下加速踏板的同时,向 2 方向拨动巡航控制手柄也可以更新最大巡航速度。
注意:
- ●如果车辆未检测到前方有行驶速度比设定速度低的车辆,可能需要数秒钟时间才能达到新的巡航速度。
取消和恢复自适应巡航(ACC)

要手动取消 ACC,可短暂地沿方向推动巡航控制手柄或踩下制动踏板。仪表板上的车速表图标变成灰色或者消失,表示 ACC 并未控制车速。
要将巡航控制恢复到先前设置的车速,可沿 4 或 6 方向拨动巡航控制手柄后松开。
要以当前行驶速度恢复巡航,可沿 2 方向拨动一次巡航控制手柄。
注意:
- ●自适应巡航只能控制车辆的速度,而无法控制车辆的行驶方向。
- ●如果驾驶员已经发现了危险,切勿等待接管请求发出后再接管车辆,请立即接管车辆。
- ●ACC 取消时,能量回收制动会使车辆减速,减速方式与无 ACC 时松开加速踏板来降低车速相同。
- ●您必须时刻关注交通状况及道路环境,并在确保安全的情况下自主决定是否使用自适应巡航。在使用自适应巡航时,如发现交通状况、道路环境或车辆状况不适宜使用该功能,或存在其他不安全因素,您应随时准备接管车辆。您始终承担着保持合适车距和车速,且符合现行交通法律法规的最终责任。
 警告:
警告:
- ●自适应巡航(ACC)是一项驾驶辅助功能,无法应对所有交通、天气和路况。
- ●请阅读本手册中有关自适应巡航(ACC)的所有章节,了解该功能的限制,驾驶员在使用功能前应该掌握这些限制。
- ●自适应巡航(ACC)是为了驾驶舒适性和便利性而设计,不属于碰撞警告或规避系统。驾驶员有责任时刻保持警惕,安全驾驶,并掌控车辆。切勿依靠系统来充分降低车辆车速。务必观察前方路况并准备随时采取纠正措施,否则可导致严重伤害或死亡。
- ●在车辆前方有行人类目标时,务必观察前方路况并准备随时采取纠正措施,否则可导致严重伤害或死亡。
- ●请勿在有急弯的曲折道路上(如S弯、连续U型弯等),结冰或湿滑路面上或天气条件(如大雨、大雪、浓雾等天气)不宜匀速行驶时,使用自适应巡航(ACC)。自适应巡航(ACC)系统无法基于路况和驾驶条件调节行驶速度。
- ●突然有其他车辆快速移动或近距离移动到本车前方、前方有车辆突然减速、有调头或横穿车辆驶入时,自适应巡航(ACC) 无法及时制动 / 减速。
- ●自适应巡航(ACC)偶尔会在不需要制动时或您未打算制动时引起车辆制动。这可能是因跟随前车过近,检测到相邻车道(特别是在弯道上)有车辆或物体等情况所导致。
- ●驾驶员有责任确定并始终保持安全的跟车距离。切勿依赖自适应巡航(ACC)来保持准确或适合的跟车距离。特别是在隧道或夜间行驶,旁车道存在卡车、大客车,跟随运超长货物的车辆需要驾驶员保持高度注意。
- ●自适应巡航是一个舒适性功能,而非防碰撞功能,所以其最大减速度有限,小于自动紧急制动和驾驶时所能请求的最大减速度。切勿依靠自适应巡航(ACC)来充分降低车辆车速以避免碰撞。务必观察前方路况并准备立即采取纠正措施。
- ●切勿在市内道路或路况多变的情况下使用 ACC。
- ●对于静止车辆或物体(如路面障碍物),尤其是前方车辆离开您所在的行驶车道导致前方出现静止车辆或物体时,自适应巡航(ACC)无法检测到所有物体,可能无法制动 / 减速。务必注意前方路况,准备迅速采取修正措施。过度依赖自适应巡航(ACC)可能会造成严重人身伤害或死亡。此外,自适应巡航(ACC)可能会对不存在或不在所行驶车道上的车辆或物体做出反应,造成车辆不必要或不当减速。
- ●自适应巡航(ACC)可能会由于制动能力有限和处于坡上而无法提供足够的速度控制,还可能会误判与前车之间距离。下坡时会增加行驶速度,从而导致车辆超过设定速度(也可能是道路限速 )。切勿依赖自适应巡航(ACC)对车辆进行充分减速来避免碰撞。行驶时务必观察路况,并准备根据需要采取正确措施。依赖自适应巡航(ACC)使车辆充分减速来避免碰撞可能会造成严重人身伤害或死亡。
- ●使用此系统驾驶时,不可以有以下行为:
- 1.完全依靠本系统。
- 2.在行人、自行车或者动物较多的环境中使用本系统。
- 3.双手离开方向盘。
- 4.视线离开行驶道路。
- ●以下情况可能导致摄像头识别障碍、雷达识别障碍等,影响ACC工作性能,引起功能退出,包括但不限于:
- 1.摄像头安装位置被改变。
- 2.摄像头被遮挡或者脏污。
- 3.夜晚识别能力降低 ,周围环境昏暗,如黎明、黄昏、夜间、隧道中。
- 4.周围环境亮度突变,如隧道入口或出口。
- 5.建筑物、风景或者大型车辆投下的大片阴影。
- 6.摄像头被光直射。
- 7.摄像头前的挡风玻璃上有水、灰尘、微划痕、油腻、脏污、雨刮器、冻结、降雪等。
- 8.雷达错位或被遮挡,亦或覆盖有泥土、冰雪、金属板、胶带、标签、树叶等。
- 9.由于车辆碰撞、剐蹭等导致雷达或者周围区域受到撞击。
- ●以下目标不会被响应,包括但不限于:
- 1.人,动物。
- 2.交通灯。
- 3.墙,路障。
- 4.自行车,摩托车,三轮车。
- 5.其他非车辆物体。
- 6.处于传感器盲区的目标。
- ●以下情况可能使ACC功能受限,需要驾驶员格外保持注意,包括但不限于:
- 1.接近或者通过道路转弯时存在多车辆并行。
- 2.处于坡上可能会丢失目标或者误判与前车之间距离。下坡时会增加行驶车速,从而导致超过巡航车速。
- 3.当相邻车道车辆仅有部分车身切入到本车前方(尤其是大巴、货车等大车切入),可能无法识别响应。
使用限制:
下列情况时,ACC 可能会取消或无法使用:
1. 踩下制动踏板。
2. 行驶速度超过120km/h。
3. 将车辆换入另一个挡位。
4. 驾驶员的座椅安全带解开。
5. 有车门打开。
6. 前舱盖打开。
7. 雷达被遮挡或致盲。由泥污、水渍、冰雪等引起的遮挡,或由光照、昏暗等引起的致盲。
8. 防抱死制动系统(ABS)激活。
9. 拉起驻车制动控制器(EPB)。
10.牵引力控制系统(TCS)激活。
11.紧急制动辅助(AEB)激活。
12.安全气囊弹出。
13.轮胎压力值异常。
14.系统发生故障或需要维修。
15.雨刮器处于 HI 挡。
无法使用或取消 ACC 时,车辆不再以设定速度稳定行驶,不再与前车保持规定的距离。
ACC 可能会因未知原因随时意外取消。务必观察前方路况并准备采取适当的措施,驾驶员有责任始终控制车辆。
下列情况不宜使用 ACC:
- 1.道路有急转弯、连续转弯或道路状况不佳,如路面湿滑或结冰。
- 2.自适应巡航(ACC)无法检测行人。
- 3.自适应巡航(ACC)无法检测到坡道另一侧的车辆或物体。
- 4.前方车辆装有突出其车身以外的物体。
- 5.施工、事故等路段。
- 6.自适应巡航(ACC)无法识别对向行驶的车辆。
- 7.雷达受限。
- 8.雷达被遮挡(灰尘、遮盖等) 或气候条件不良(如大雨、大雪、浓雾)。
以上示例、警告、限制未尽述影响 ACC 正常工作的所有情况。




©2015-2026 广州小鹏汽车科技有限公司粤ICP备15067788号![]() 粤公网安备 44011202003576号营业执照
粤公网安备 44011202003576号营业执照
{kind=link}